モデル(油圧ショベル・クローラダンプ)の概要・構成
このチャプターで油圧ショベル、クローラダンプのモデル構成について説明する。最終的なモデルはPrefabファイルとして保存されており、MainSceneで使用される:
油圧ショベル:Assets/Excavator/Prefabs/Excavator_zx135u.prefab
クローラダンプ:Assets/DumpTruck/Prefabs/DumpTruck_ic120.prefab
URDFファイルからの取込み
AGX UnityのURDF Importerを使用し、油圧ショベル、クローラダンプのURDFモデルをUnityにインポートした。 URDFモデルはプロジェクトファイルに保存されている。
油圧ショベル |
クローラダンプ |
|
|---|---|---|
元々のURDF |
Asset s/Excavator/URDF/original |
Asset s/DumpTruck/URDF/original |
修 正したURDF |
As sets/Excavator/URDF/fixed |
As sets/DumpTruck/URDF/fixed |
修正したURDFモデルは、剛体と関節の構成が含まれる。コリジョンモデルやTracks等はUnityにインポート後、Unity Editorから追加した。合わせて、不要な剛体を削除した。
モデル概要(コリジョンモデル、ビジュアルモデル)
コリジョンモデルは、Primitive形状(ボックスと円筒)を使用し、Unity Editorから追加した。MainSceneのAGXUnity.Rendering.DebugRenderManagerを有効化するとコリジョンモデルを確認することができる。
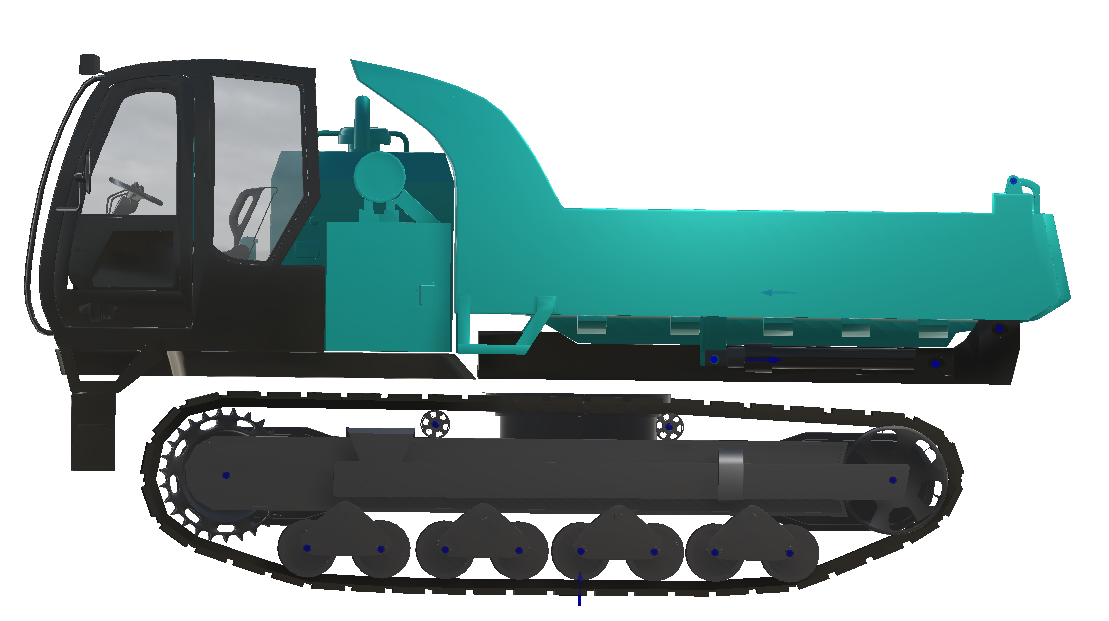
油圧ショベルのビジュアルモデル
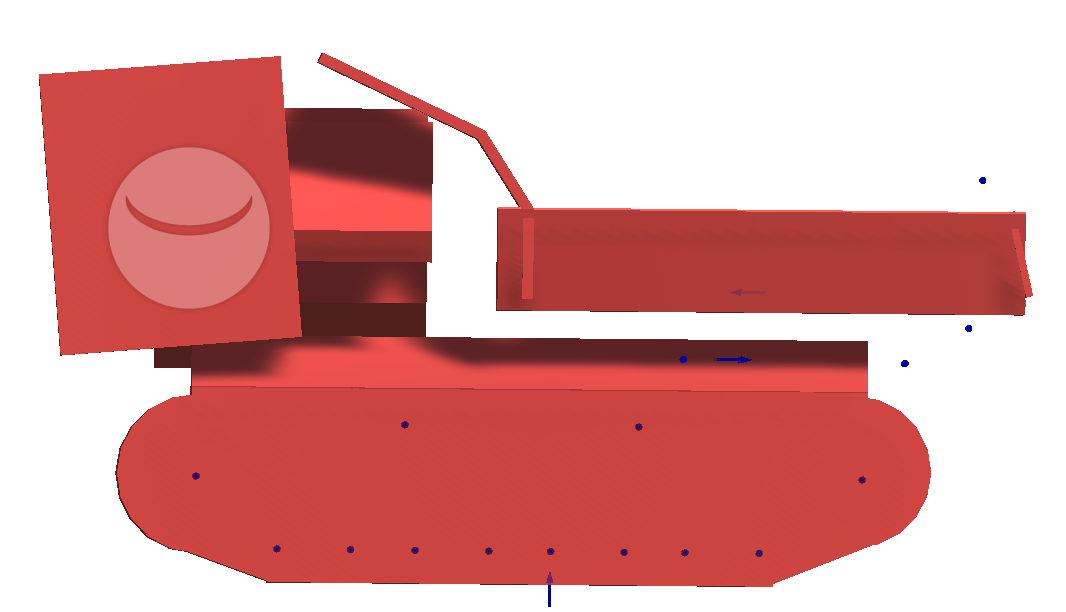
油圧ショベルのコリジョンモデル
クローラダンプのビジュアルモデル
クローラダンプのコリジョンモデル
動作方法
モデルを動かすには、AGX DynamicsのHinge関節のLockControllerまたはTargetSpeedControllerを使用して指令値を設定する。制御するHinge関節は以降の通り。
油圧ショベル |
クローラダンプ |
|---|---|
sprocket_L_joint |
sprocket_L_joint |
sprocket_R_joint |
sprocket_R_joint |
upper_joint |
container_joint |
boom_joint |
|
arm_joint |
|
backet_joint |
それぞれの建機のルートオブジェクトにROSからのデータ通信を扱うクラス(Excavator/DumpTruck Subsriber)とUnity内でキーボード・ゲームパッドでの操作を扱うクラス(Excavator/DumpTruck Player Input Handler)の制御インタフェースを用意した。これにより他の制御システムを容易に変更できる。
以下の図の通り、Excavator_zx135u のPrefabのルートにExcavator.cs ComponentとDumpTruck_ic120のPrefabのルートにDumpTruck.cs Componentが用意されており、制御指令が各関節に伝達される。
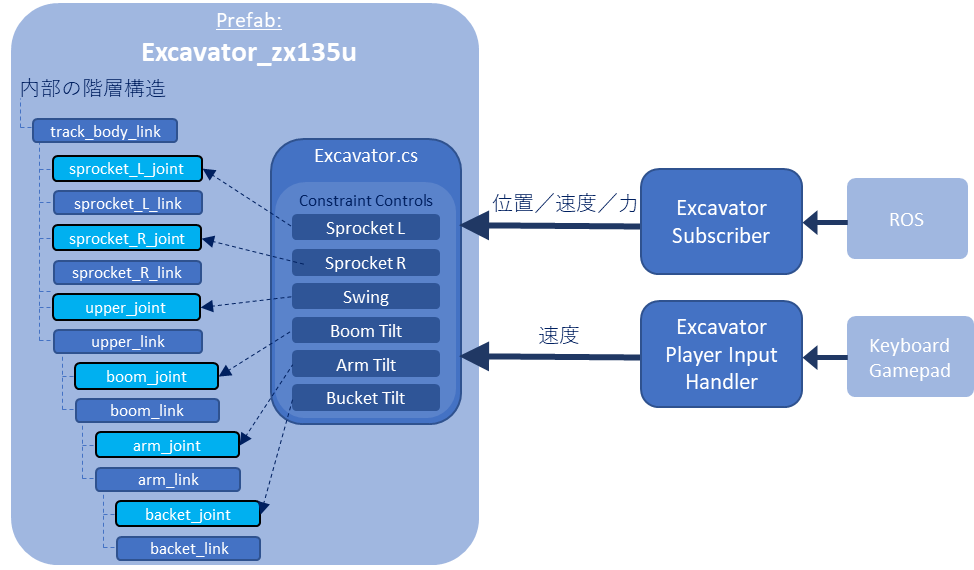
Excavator ComponentとDumpTruck Componentは、Constraint Controlオブジェクトを経由して、各関節への指令値の設定や、制御種類を替えるインテリジェンスを提供している。以下の画像で、InspectorからExcavator_zx135uのExcavator Componentのバケット用のConstraint Controlを確認できる。
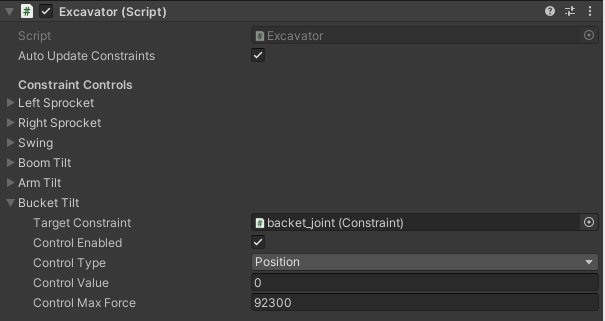
Play時にExcavator/Dump Truck Subscriberは受けた指令値でControl Valueを更新する。
以下の3つの制御方式(Control Type)がある。
Control Type |
設定方法 |
|---|---|
Pos ition(位置、角度) |
LockControllerのsetPositionメソッド |
Sp eed(速度、角速度) |
TargetSpeedControllerのsetSpeedメソッド |
Force(力、トルク) |
TargetSpeedControllerのsetForceRangeメソッド (setSpeedは無限に設定) |
本プロジェクト用の特別なモデル設定
履帯(Tracks)について
シミュレーションには、URDFモデルに入った履帯モデルではなく、AGXUnityが提供するTrack Componentを使ったシミュレーション用の履帯を生成し使用する。
手順は、Track Wheel ComponentでWheelの設定を行い、Track Componentによって実際の履帯生成を行う。Track Rendererによって履帯のビジュアルを設定し、Trackのコンタクトマテリアル設定によってTerrainと履帯の接触について定義を行う。
以下で、それぞれの設定方法を説明する。
Track Wheel Component
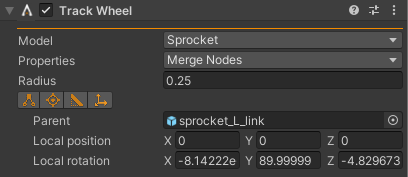
Track Wheel ComponentをGameObjectに追加することでWheelを定義する。
Track Wheel Componentから自動的に履帯のルートが計算されるため(次項で説明するTrack Componentが計算を行う)、履帯が曲がるところには必ずTrack Wheel Componentを設置する必要がある。
本プロジェクトでは、油圧ショベルとクローラダンプで異なるWheelの設定を行った。もとのURDFモデルの詳細さとデモ使用時の必要性を考慮した。
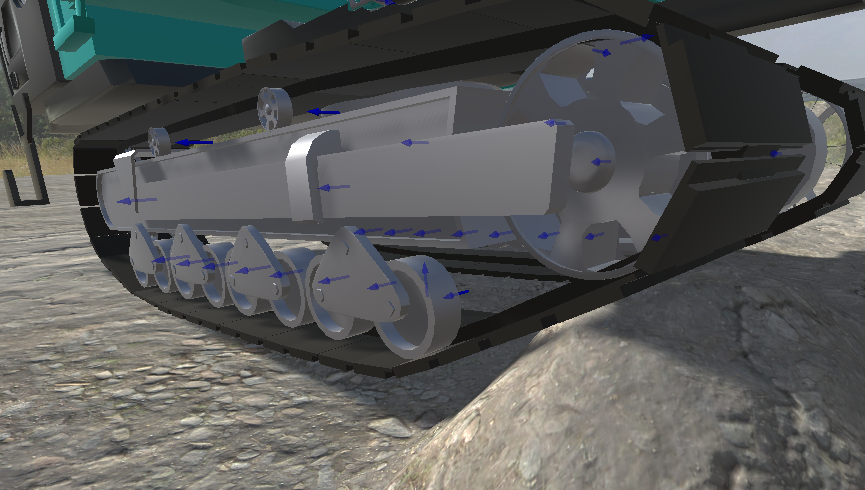
下図の通り、油圧ショベルモデルには3つのTrack Wheel Componentを設置した。
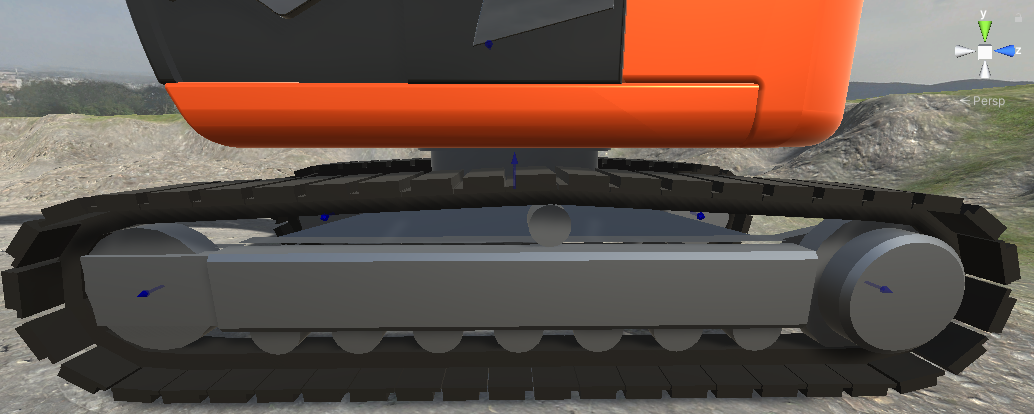
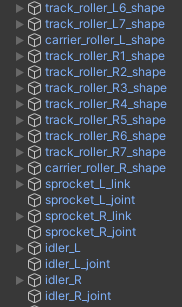
ただし、下側の7つのローラーは、Track Wheel Componentではなく、Track Frameの剛体に含まれるShapeとして存在している。AGX UnityのShape ComponentはTracksと衝突できる。
本プロジェクトでは、ローラーは固定されていてサスペンションは効かない。これは剛体と関節の数を減らすことで、パフォーマンスを向上させるためである。
クローラダンプについては、以下画像に示されるように、それぞれのローラーはTrack Wheel Componentが追加された剛体としており、Hinge関節でTrack Frameと接続されている。

Track Component
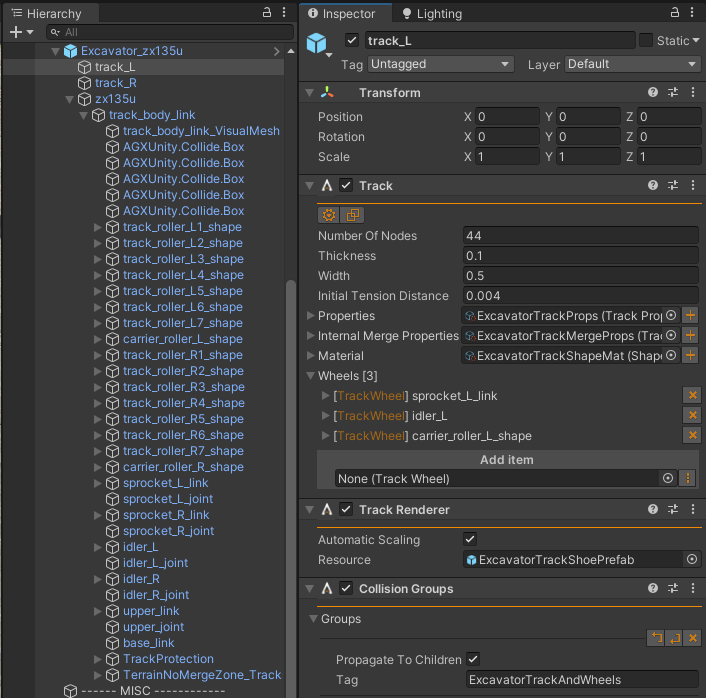
Track Renderer
Track Componentと同じGameObjectに追加されたTrack RendererというComponentは、履帯のビジュアルを生成する。このComponentのResourceプロパティからカスタムの履帯要素用のビジュアルモデルを設定できる。このプロジェクトでは、3つのボックスを含む簡単な構成のビジュアルモデルを作成した。
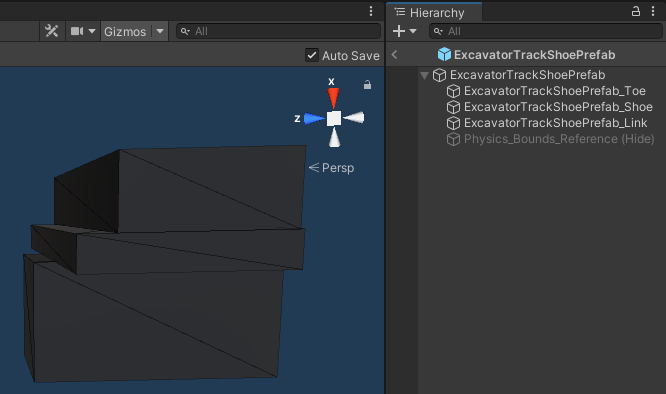
Automatic ScalingプロパティをTrueに設定すると、ビジュアルモデルはTrack Componentで設定したThickness、widthなどの情報をもとに自動的にスケールされる。
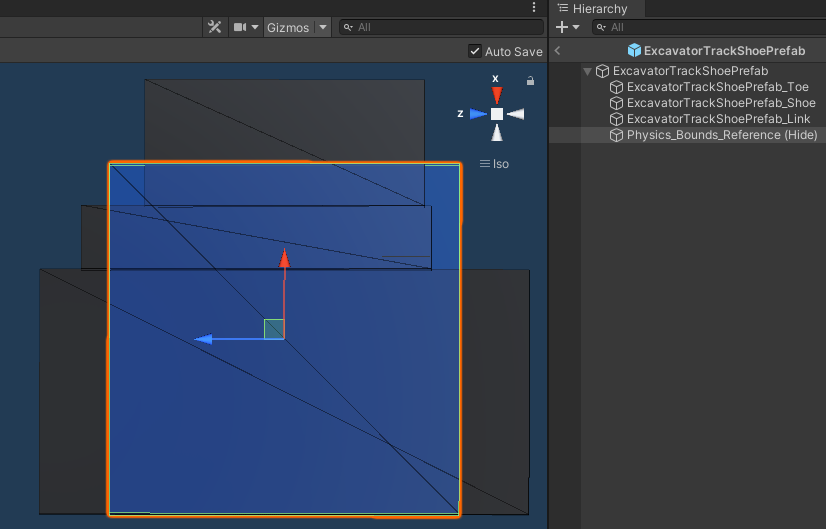
なお、本プロジェクトでは、履帯のコリジョンモデルに比べてビジュアルモデルを少し大きく設定し、走行時に履帯がTerrainに侵入しているように見える設定としている。
これは履帯の爪などが地面に食い込むように見えることをビジュアル的に再現し、デモとしてのアピール度を上げるために行った。
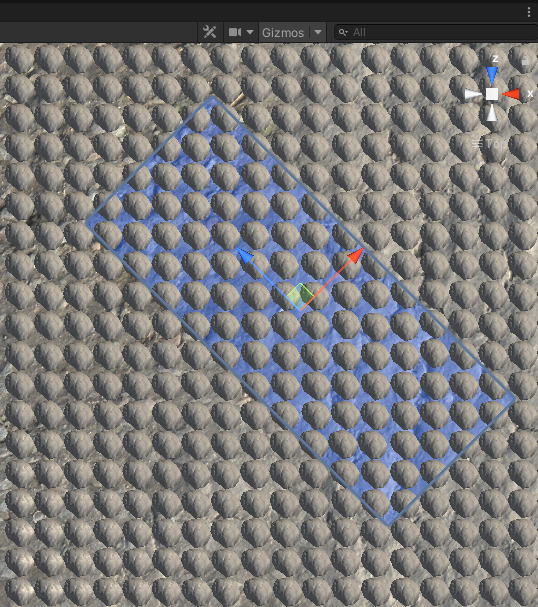
以下の図で、ビジュアルモデルは黒のボックス、コリジョンモデルは黄色で囲まれた部分である。
Track用のContact Material
TrackとTerrainの間の接触プロパティの設定を行う。
そのためには、Track Componentに設定したShape MaterialとTerrain のShape Materialの間のContact Materialを作成し、MainSceneに入っているContact Material Managerに追加する必要がある。
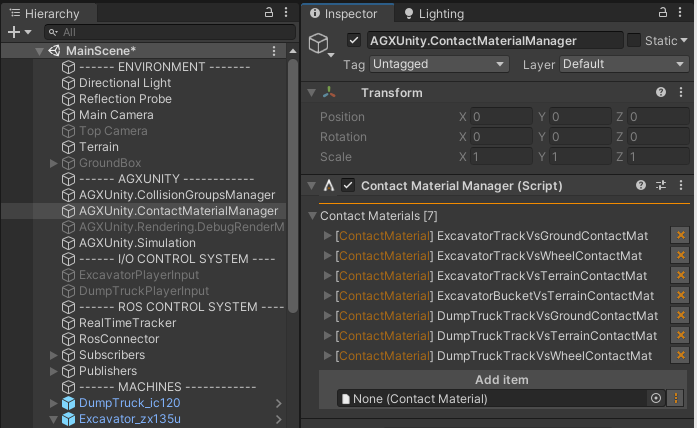
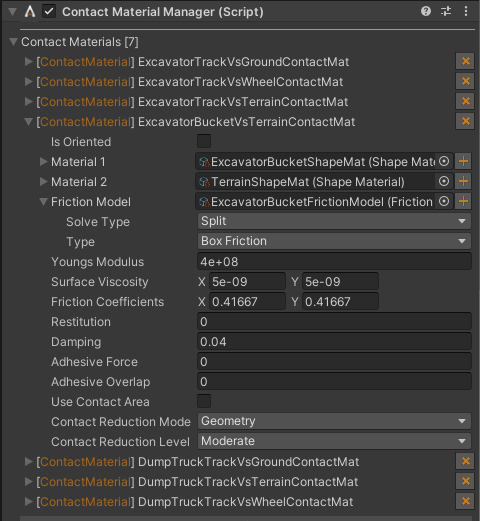
油圧ショベルのTrackとTerrainの間のContact Materialの設定は以下の画像の通り。
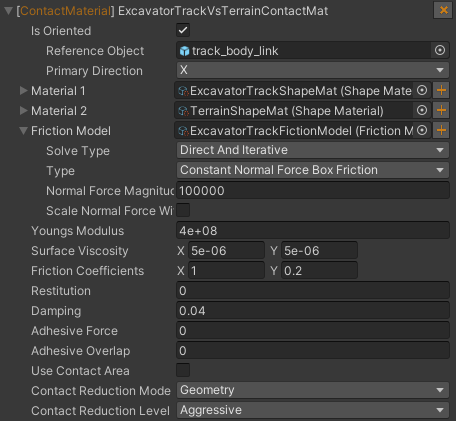
Tracks用のContact Materialの調整について、重要なポイントを以下に示す。
Is OrientedをTrueに設定してから、Track FrameのRigid Bodyを選択しPrimary Directionをローカルのフォーワード軸に設定する。
建機が滑らかに旋回できるように、Friction CoefficientのPrimary Direction(左側の値)をSecondary Direction(右側の値)より大きく設定する。
摩擦の計算に使用される法線方向の力が弱すぎないようにFriction Modelを上の画像の通りにConstant Normal Force Box Frictionに設定し、定数を調整する。
パフォーマンス向上のためにContact Reduction LevelをAggressiveに設定。
油圧ショベルのバケット掘削設定について
バケットは複数のShapeで構成されるが、Terrainを掘削できるように特別なDeformable Terrain ShovelというComponentの設定が必要である。バケット用のGameObjectは、Excavator_zx135のHierarchyのbacket_linkにある。
コリジョンモデル
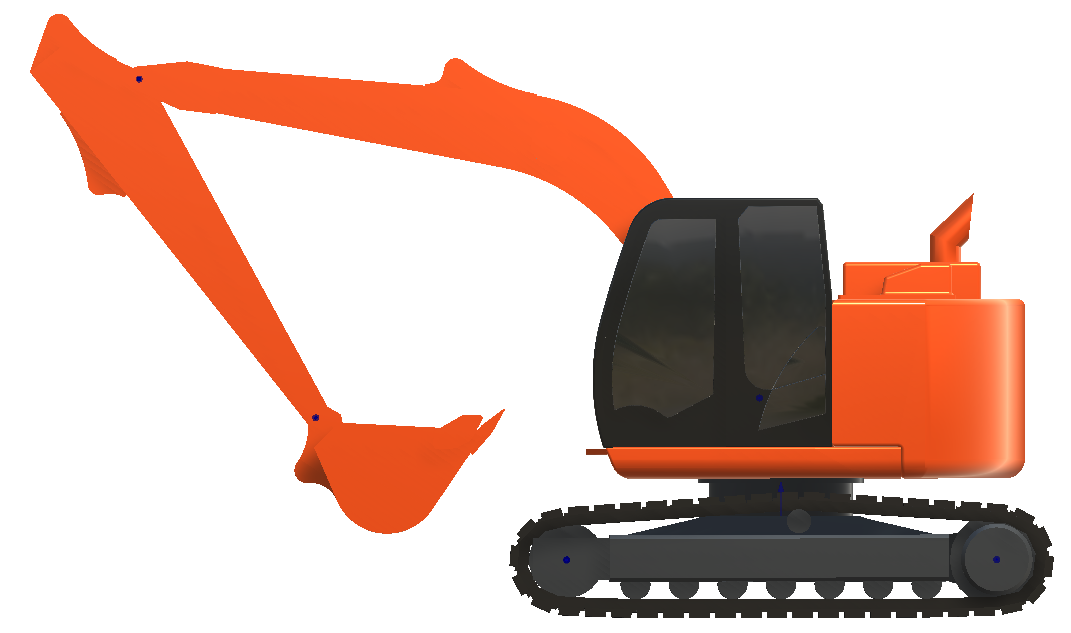
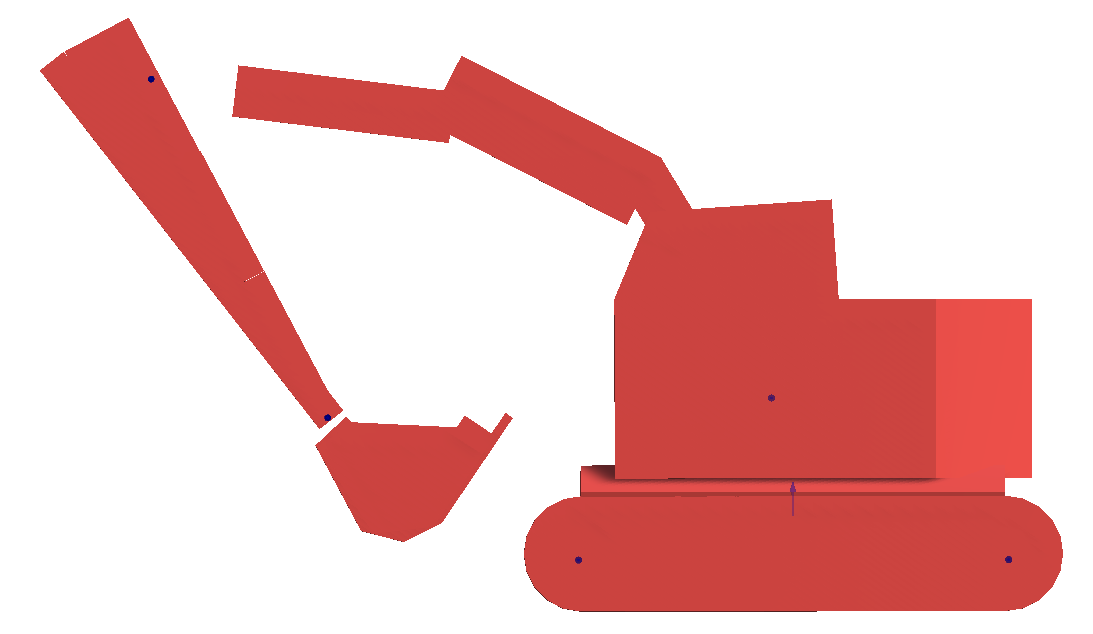
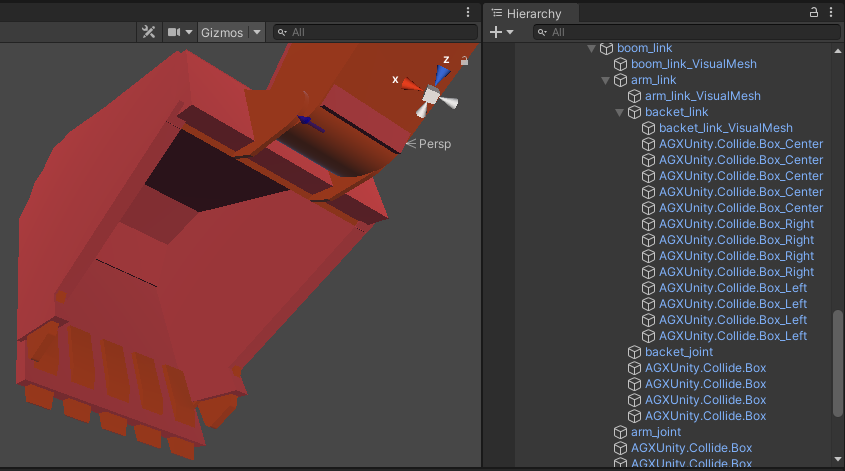
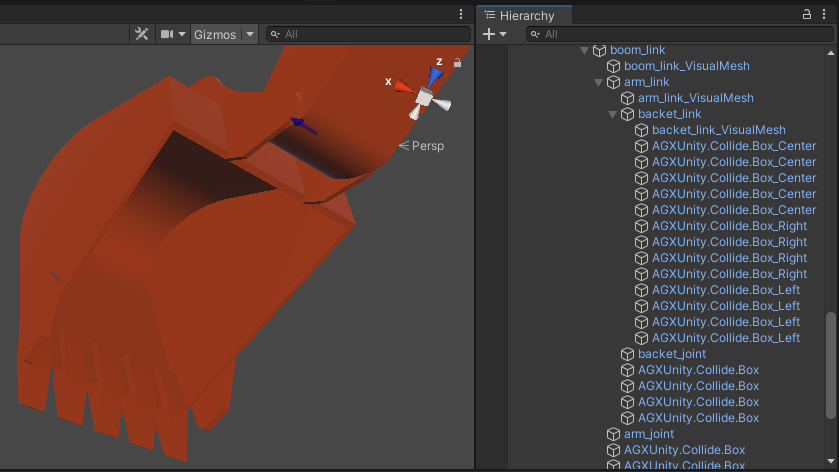
バケットのコリジョンモデルは~6cmの厚みの複数のボックスから構成される。以下、左側の画像はビジュアルのみ、右側ではコリジョンモデルが赤い色で表示されている。
Deformable Terrain Shovel
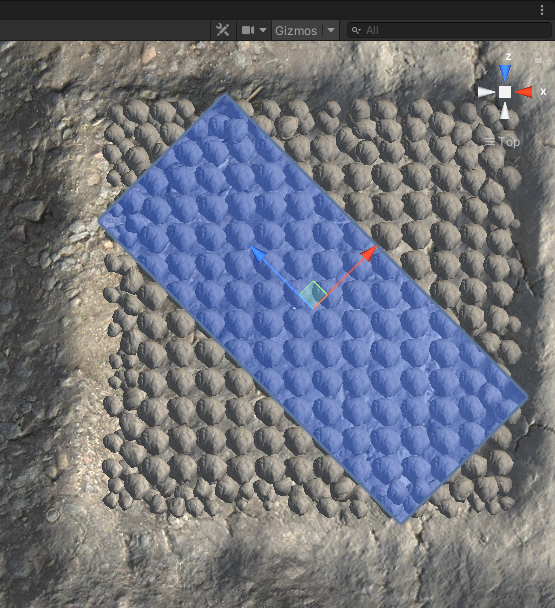
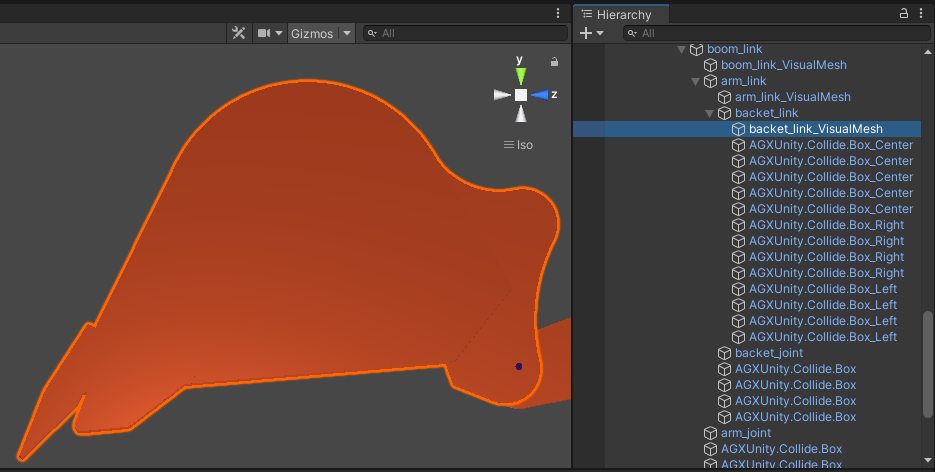
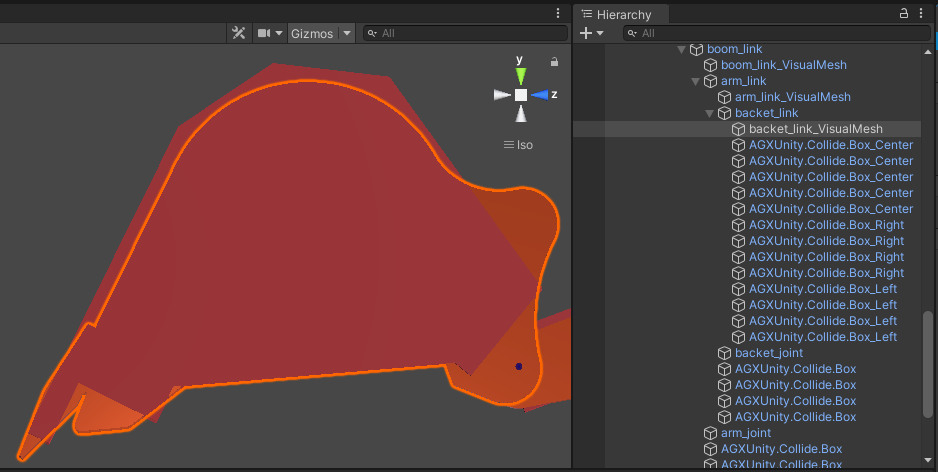
backet_linkに追加されているDeformable Terrain Shovel ComponentのInspectorからTop Edge、Cutting Edge、Cutting Directionを設定する。それぞれ、左下の画像で、黄色、赤、緑の線で表示される。合わせて、掘削用のプロパティを設定できる。
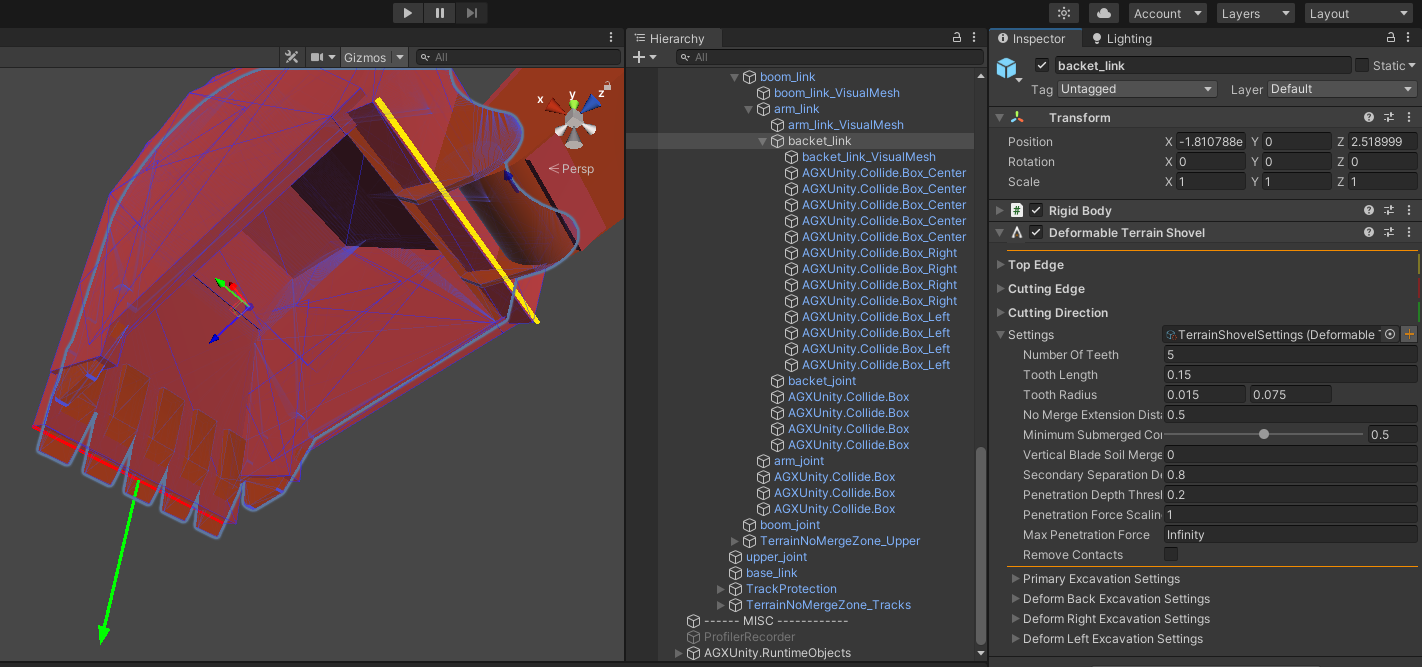
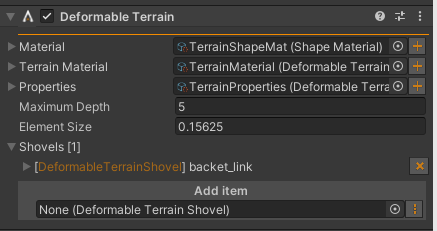
バケットによるTerrainの掘削が機能するようにTerrain ComponentのInspectorにあるShovelsリストにDeformable Terrain Shovelへの参照を追加している。
Contact Material
最後に、バケットと地形の間の接触プロパティであるContact Materialを設定する。Restitutionを0に、Contact Reduction LevelはModerateに設定している。パフォーマンスの向上のためにContact Reduction LevelをAggressiveに設定できるが、粒子のすり抜けが発生しやすくなるので注意する必要がある。
履帯への粒子侵入を防ぐ設定について
粒子やバケットなどがTrackに侵入しないためのコリジョンモデルを作成した。
Excavator_zx135uとDumpTruck_ic120のぞれぞれの階層構造にTrackProtection
GameObjectがあり、その子供としてTrackとの衝突を保護するShapeをまとめている。Track
Protectionはtrack_frame_link Rigid Bodyに含まれている。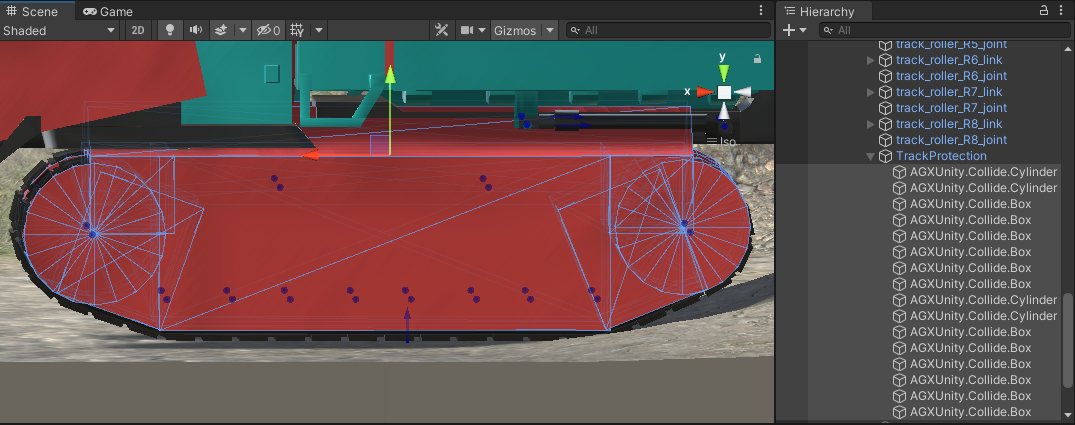
履帯、Terrain、WheelとTrackProtection間のShapeはお互いに衝突させない設定が必要である。設定にはCollision Groupsという機能を利用した。
TrackProtection GameObjectに、Collision Groups Componentを追加した。
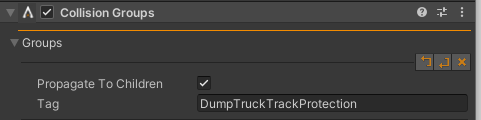
Propagate To Childrenにチェックを入れると、全ての子Shapeも、Tagに示される名前のCollision Groupに入る。本プロジェクトでは以下のグループを用意した。
グループ名 |
GameObject |
|---|---|
DumpT ruckTrackProtection |
DumpTr uck_ic120のTrackProtection(全ての子供を含む) |
DumpTruckTracks |
DumpTruck_ic120のtrack_L, track_R |
TerrainHeightField |
Terrain |
Excav atorTrackProtection |
Excavat or_zx135uのTrackProtection(全ての子供を含む) |
ExcavatorTracks |
Excavator_zx135uのtrack_L, track_R |
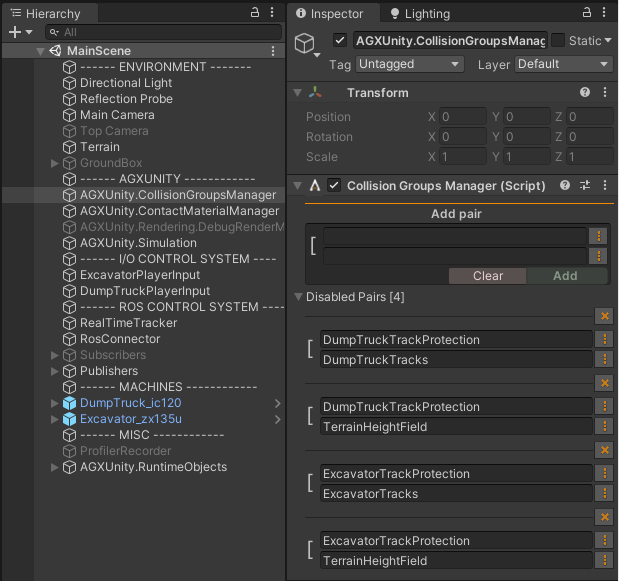
最後に、DumpTruckTrackProtectionグループのShapeがDumpTruckTracks、TerrainHeightFieldのグループと衝突しないように、Collision Groups ManagerのDisablePairsリストにグループペアを追加した。油圧ショベルについても同様の設定を行った。
Terrain No Merge Zone
AGX Terrainは粒子をTerrainにマージするかどうか常に監視しており、要件が満たされていれば即時マージが実行される。粒子がTerrainにマージされるとその地点の地形が高くなり、建機等が近くにあると不自然な挙動を引き起こすことがある。
Tracksの近くまたは中にある粒子がTerrainにマージされると、Tracksの下の地面が盛り上がる。近くの建機に地形の盛り上がりが力として伝わり、建機が跳ねる現象が発生する。
Terrainと粒子が離れていても、荷台やキャビン上の粒子がTerrainにマージされ、不自然な挙動が起きることがある。
クローラダンプには、4つのBox Shapeを含むTerrain No Merge Zoneを設定していて、DumpTruck_ic120の階層構造から確認できる。
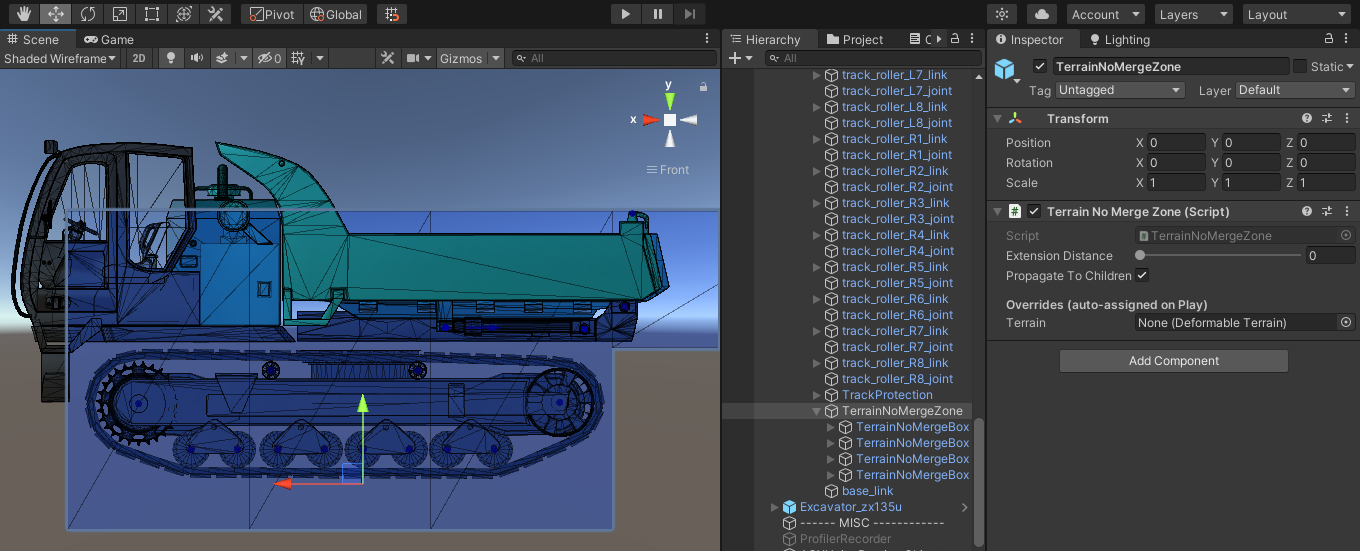
DumpTruck_ic120、Excavator_zx135uのルートオブジェクトのInspectorからTerrain No Merge Zoneへのショートカットがある。テスト用に無効化できるようにしている。
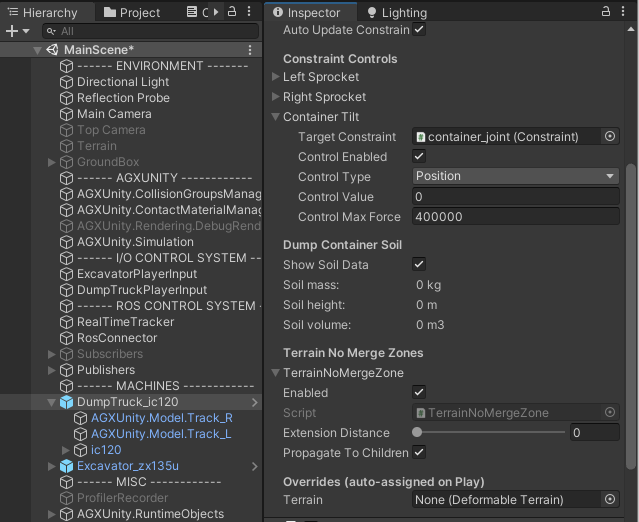
注意点: No Merge Zoneとして設定されるエリアは、Terrain No Merge ZoneのShapeのエリアと異なり、Shapeのエリアを含むワールド座標系のx、y、z軸に沿ったバウンディングボックスがエリアとなる。
1. 2.