インストール方法
注釈
本ページの内容は、OperaSim-AGX リポジトリの main ブランチの状態を前提としています。
Unity / AGX Dynamics のバージョン等は、今後の更新に応じて適宜読み替えてください。
1. Unity と AGX Dynamics のインストール
警告
OperaSim-AGX を実行するには、Unity 本体に加えて AGX Dynamics のライセンス が必須です。
Unity Hub をインストールする
Windows / macOS の場合: https://unity3d.com/jp/get-unity/download
Linux の場合: https://unity3d.com/get-unity/download
(Linux 版での動作確認は現時点では十分には行っていません)
Unity Hub から、次のバージョンの Unity Editor をインストールする
Unity 2022.3.62f1
AGX Dynamics をインストールし、ライセンスファイルを取得する
例: AGX 2.38.0.1 (x64 VS2022)
利用するモジュール:
AGX Dynamics Core
AGX Dynamics Terrain
AGX Dynamics Granular
AGX Dynamics Tracks
インストール方法やライセンスの取得方法は AGX Dynamics のマニュアル に従ってください。
2. OperaSim-AGX プロジェクトの取得と Unity Editor の起動
GitHub から OperaSim-AGX を取得する
$ cd (作業ディレクトリ) $ git clone https://github.com/pwri-opera/OperaSim-AGX.git
あるいは GitHub の画面から ZIP をダウンロードして展開しても構いません。
Unity Hub を起動し、画面右上の「追加」ボタンから クローン/展開した
OperaSim-AGXフォルダを選択する。初回起動時には Unity Editor のインストールやライブラリの生成のため、 数分程度かかる場合があります。
指定の Unity Editor (2022.3.62f1) がインストールされていない場合は、 このタイミングで自動的にインストールを促されます。
「OperaSim-AGX」プロジェクトを Unity Hub のリストから選択し、 Unity Editor を起動する。
3. Scene ファイルの選択
Unity Editor 起動後、シーンに建設機械モデルが表示されていない場合は、
プロジェクトウィンドウから Assets/Scenes/MainScene.unity をダブルクリックしてロードします。

4. AGX Dynamics ライセンスファイルの配置
AGX Dynamics のインストール時に取得したライセンスファイル
(通常は .lic 拡張子) を Unity プロジェクト内の所定の場所にコピーします。
コピー先の例:
Assets/AGXUnity/Plugins/x86_64

Unity Editor を再起動し、AGX Unity のインスペクタ等で ライセンスが認識されていることを確認してください。
5. ROS-TCP-Connector の設定
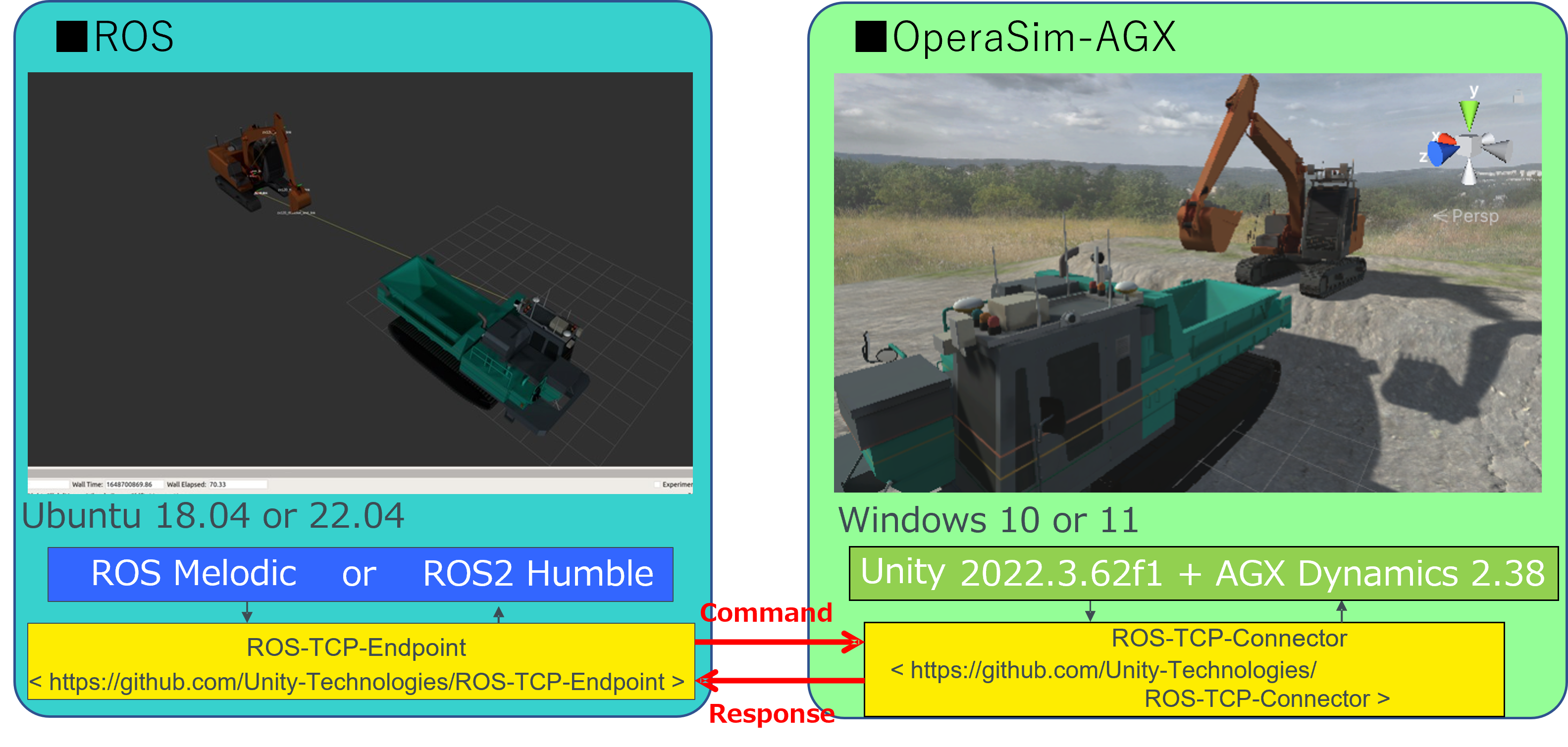
OperaSim-AGX と ROS (ROS 1 / ROS 2) の通信には ROS-TCP-Connector を使用します。
Unity プロジェクトを初めて開いた際に必要なパッケージが自動的に追加されない場合は、 Package Manager から手動で追加してください。
使用する主なパッケージ (参考)
AGXUnity: 5.0.1
ROS-TCP-Connector: 0.7.0
URDF-Importer: 0.5.2
UnitySensors: 開発版
ROS 側との接続設定は、Unity Editor 上部のメニューから行います。
メニューバーから を開く。
ROS IP AddressとROS Portに、ROS 側 PC の IP アドレスおよびポート番号を設定する。 - デフォルトのポート番号は10000です。ROS 2 を利用する場合は、
ProtocolをROS1からROS2に変更する。

6. ROS側セットアップ
ROS側のセットアップ(ROSのインストール、 ROS-TCP-Endpoint のビルド、起動手順)は以下のページを参照してください。